































































































Innovative drone system facilitates water rescue
As part of the RescueFly research project, which is funded by the German Federal Ministry of Digital Affairs and Transport, the RescueFly system was successfully demonstrated to the public for the first time in a prototype status on October 6.
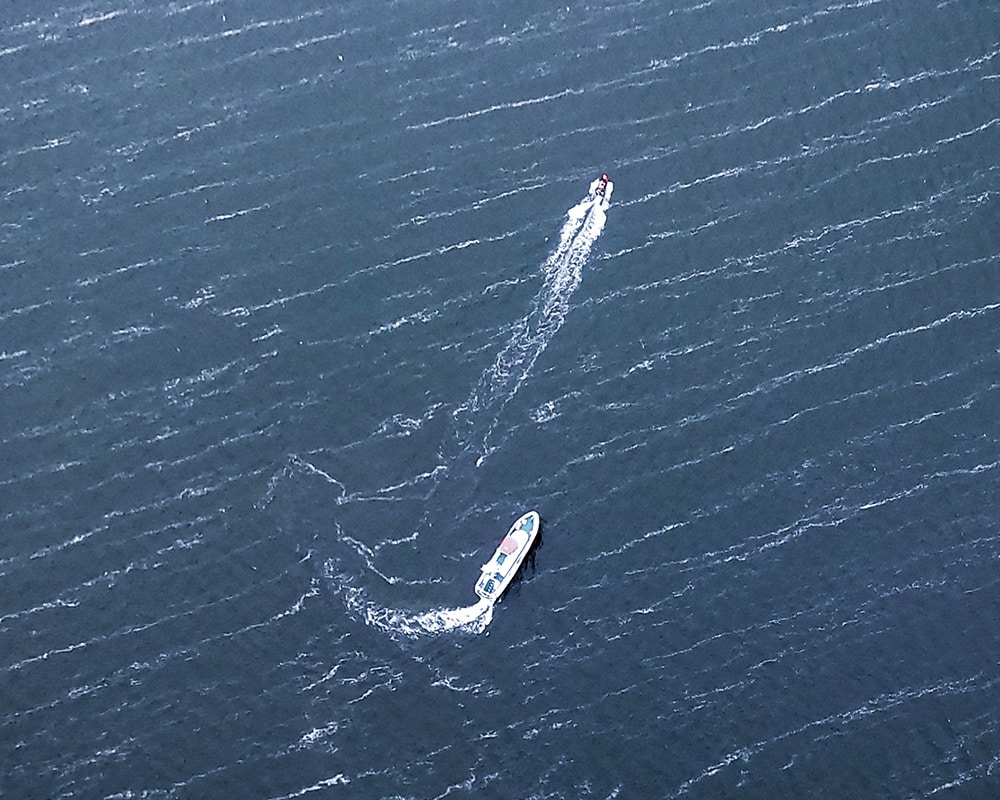
The aim of the project is to use drones to support the person in distress and the emergency services in the event of an emergency in the water. During the test flight, which took place at Lake Partwitz in Lusatia, a water rescue operation was simulated. During the half-hour demonstration, the consortium partners demonstrated the entire rescue chain - from making the emergency call, to the use of the drone, to the completion of the rescue mission.
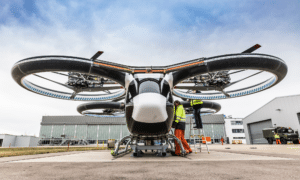
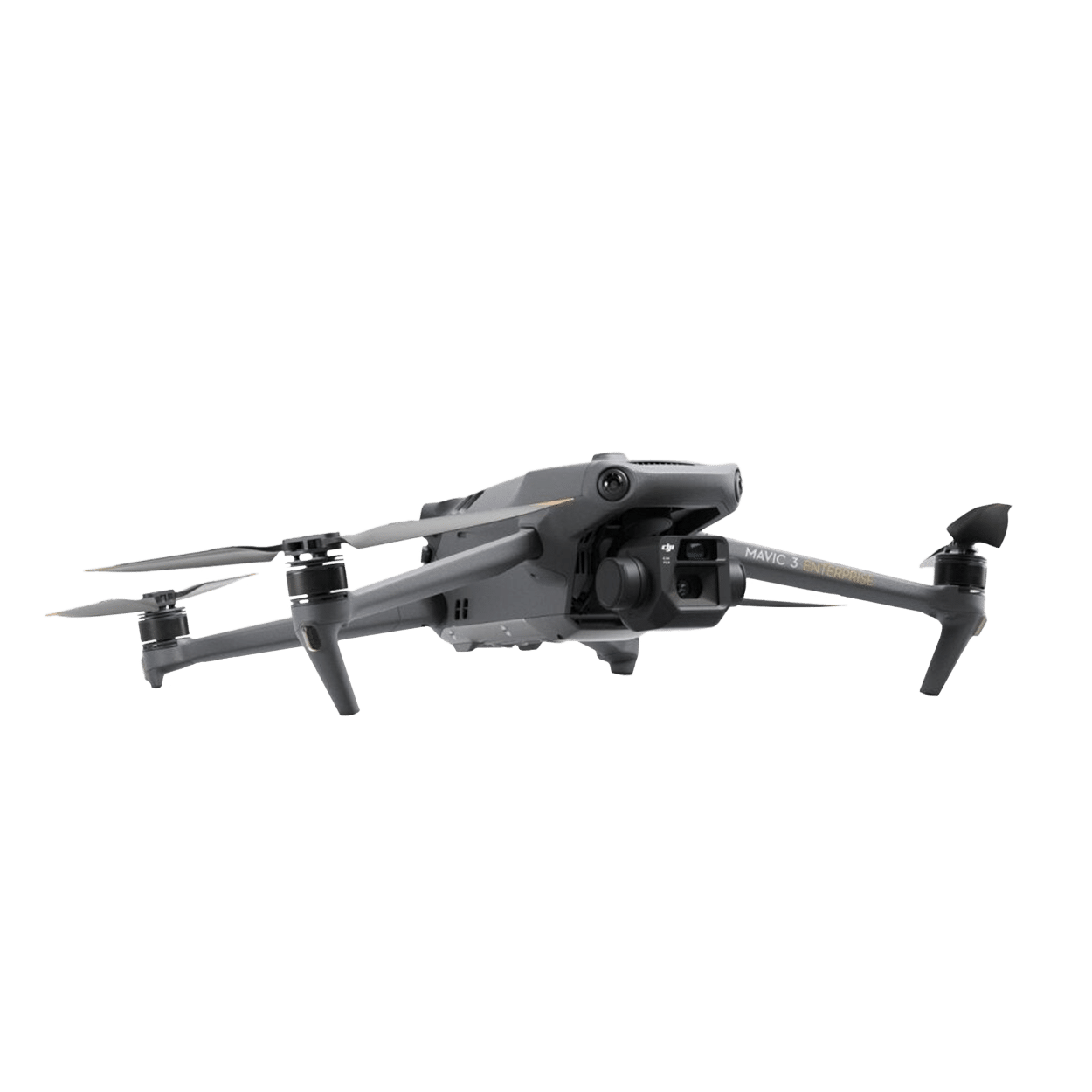
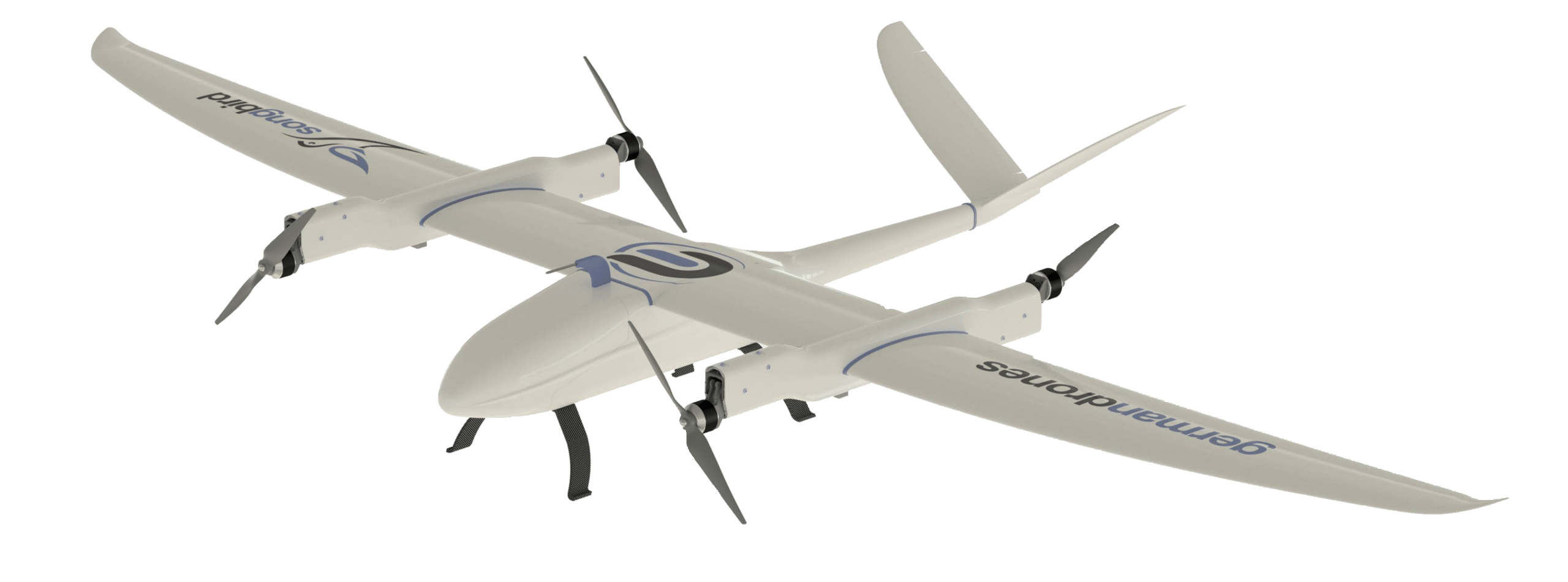
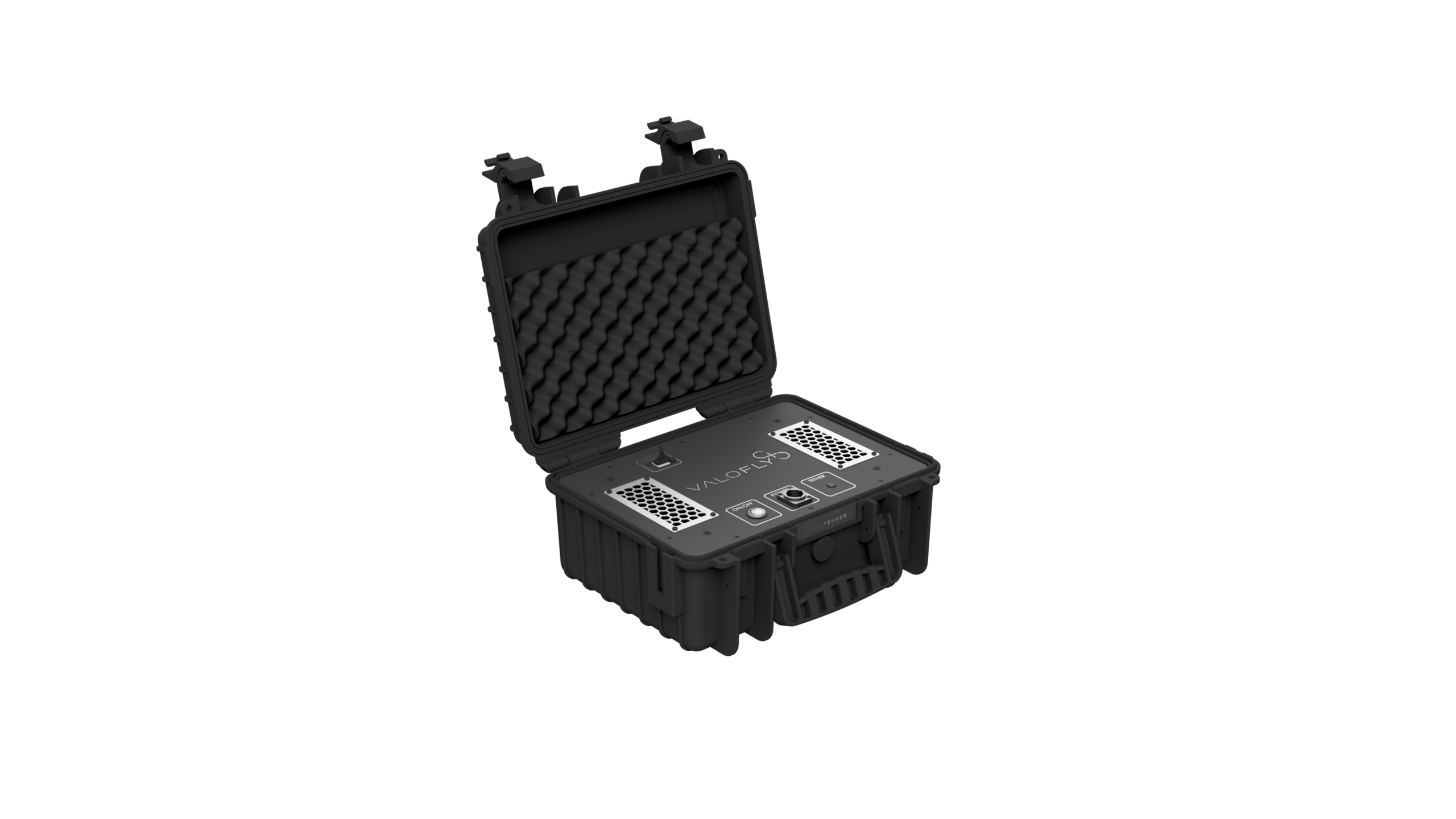
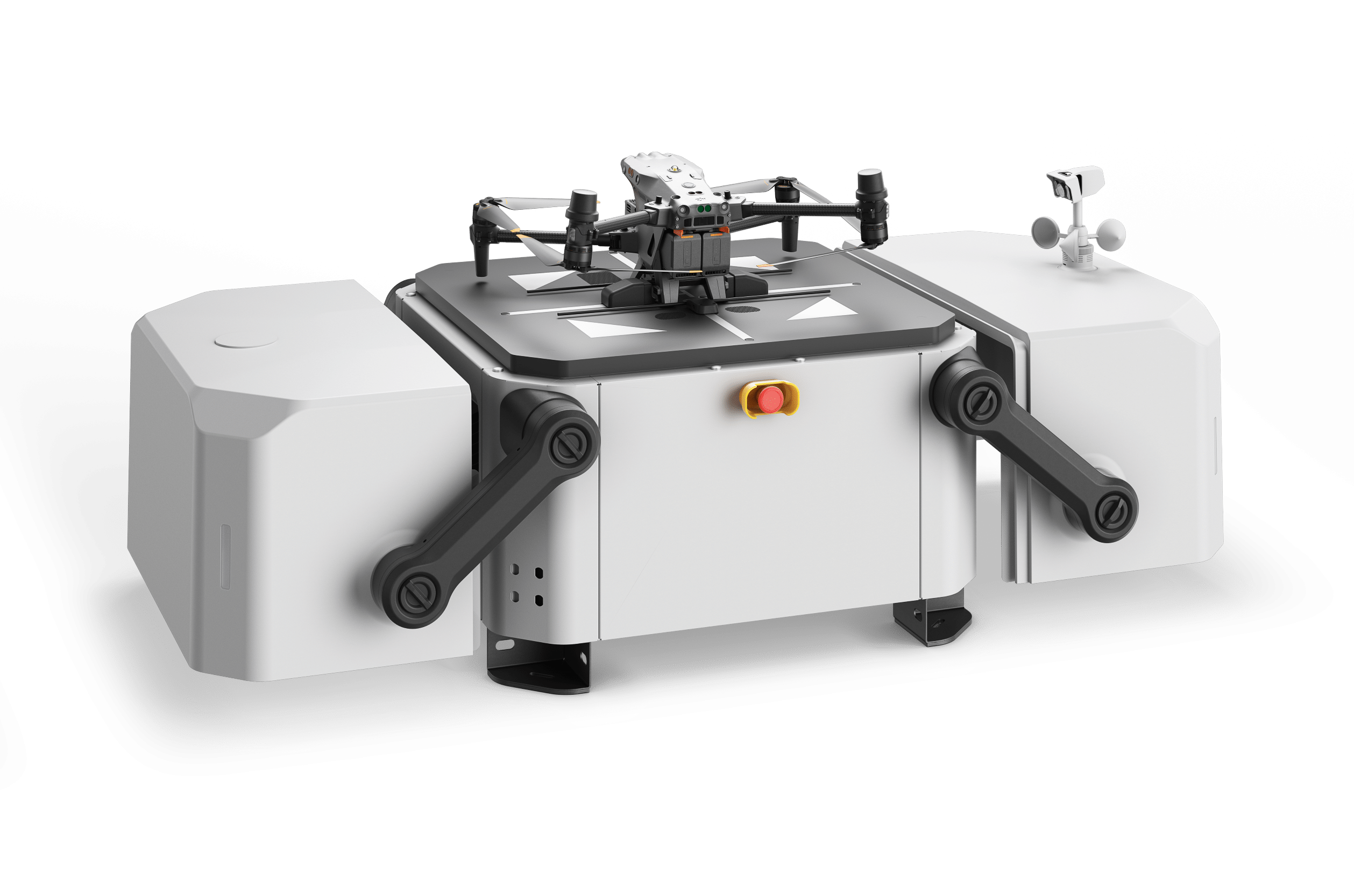
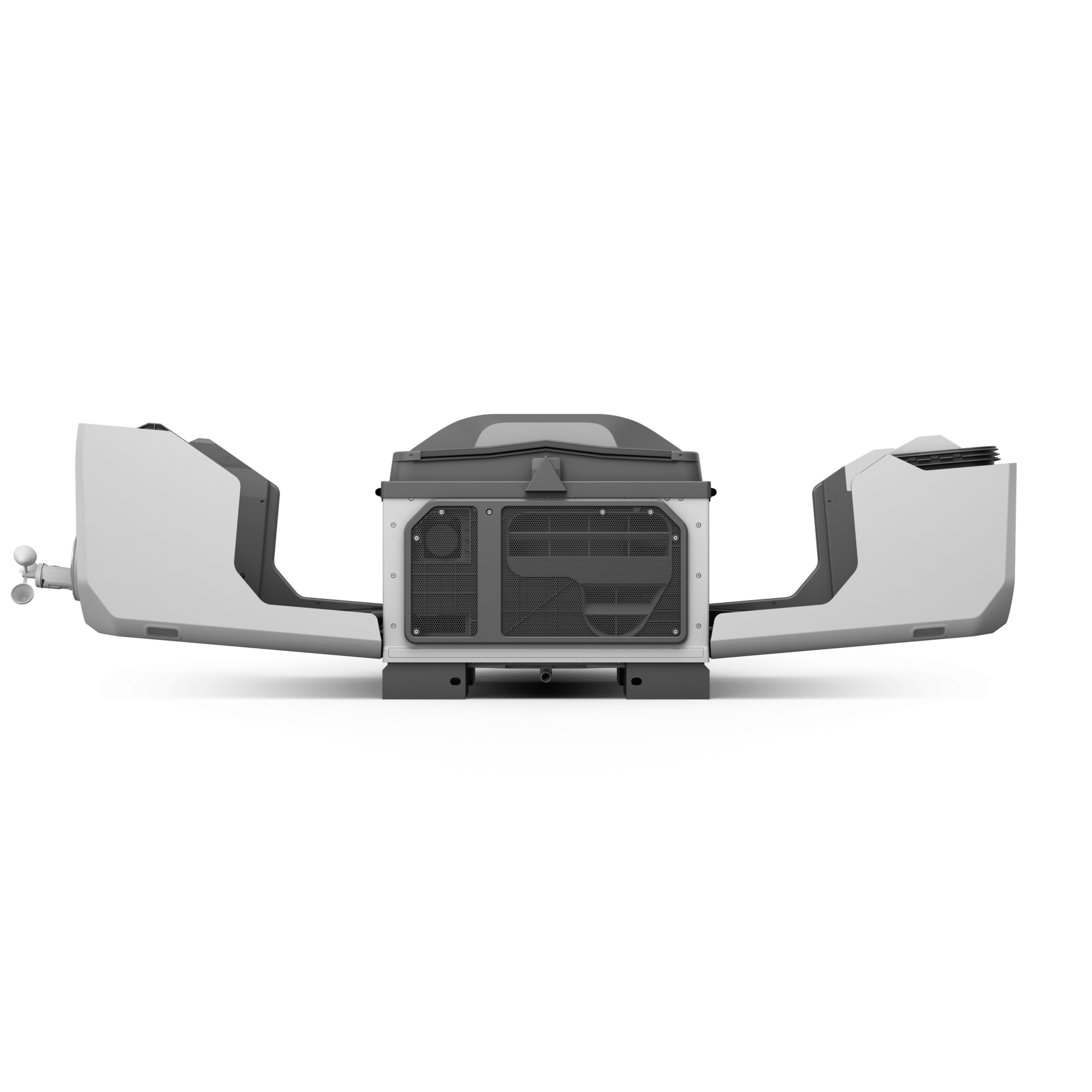
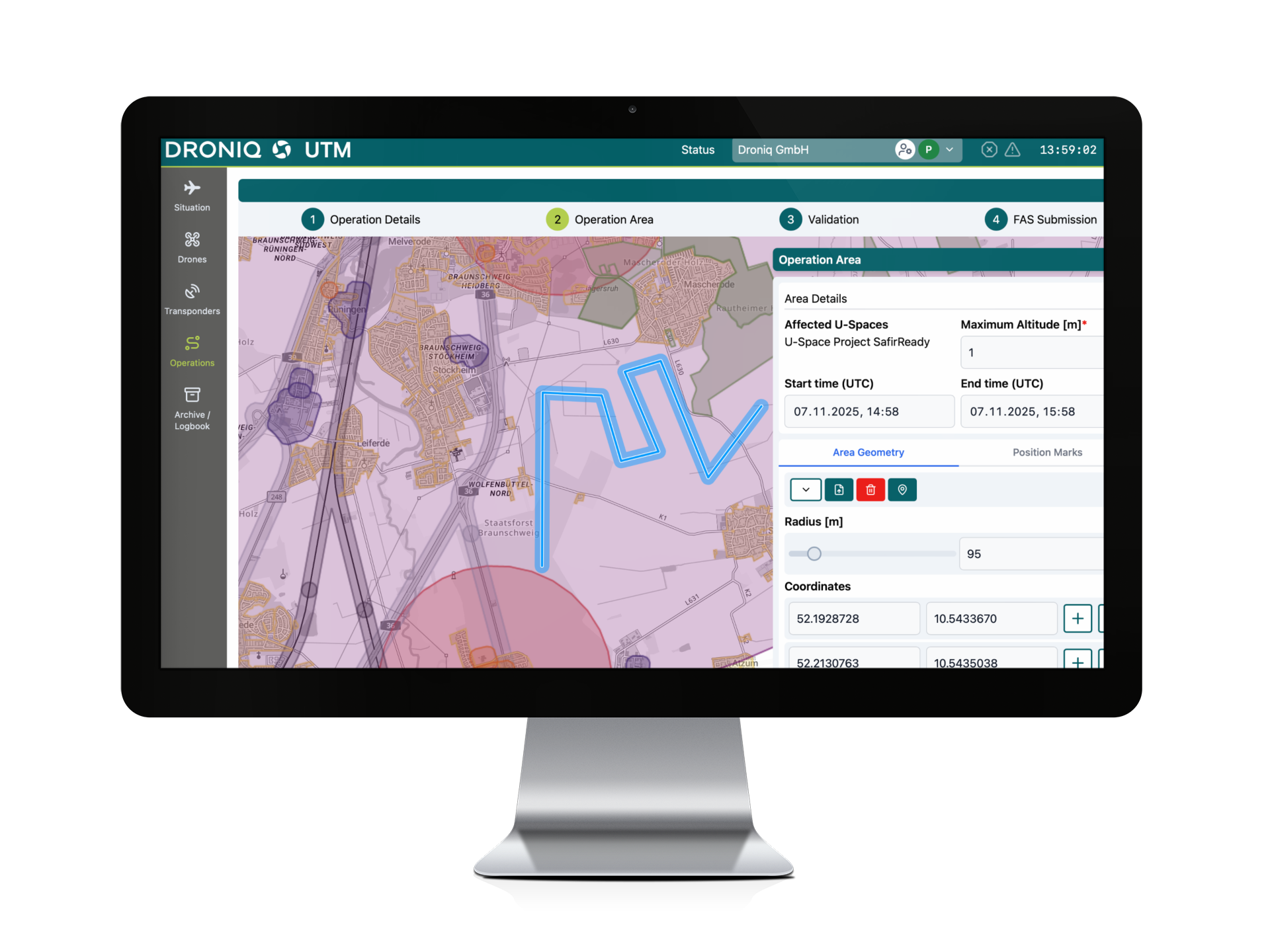
The heart of the system is a drone that takes off automatically from a drone hangar. This hangar, developed by the TU Chemnitz, is already located in the drone's area of operation at Lake Partwitz. The drone from the company MINTMASTERS, which can reach speeds of up to 85 km/h, not only takes off and lands automatically in the hangar, which opens automatically before the mission, but also flies along a specially defined, safe path to the area of operation. All possible flight trajectories have already been precalculated by the TU Dresden. The rapid opening of the hangar (5 seconds), the drone already on standby and the fastest route to the mission area play a crucial role in water rescue: the time saved helps save lives in an emergency.
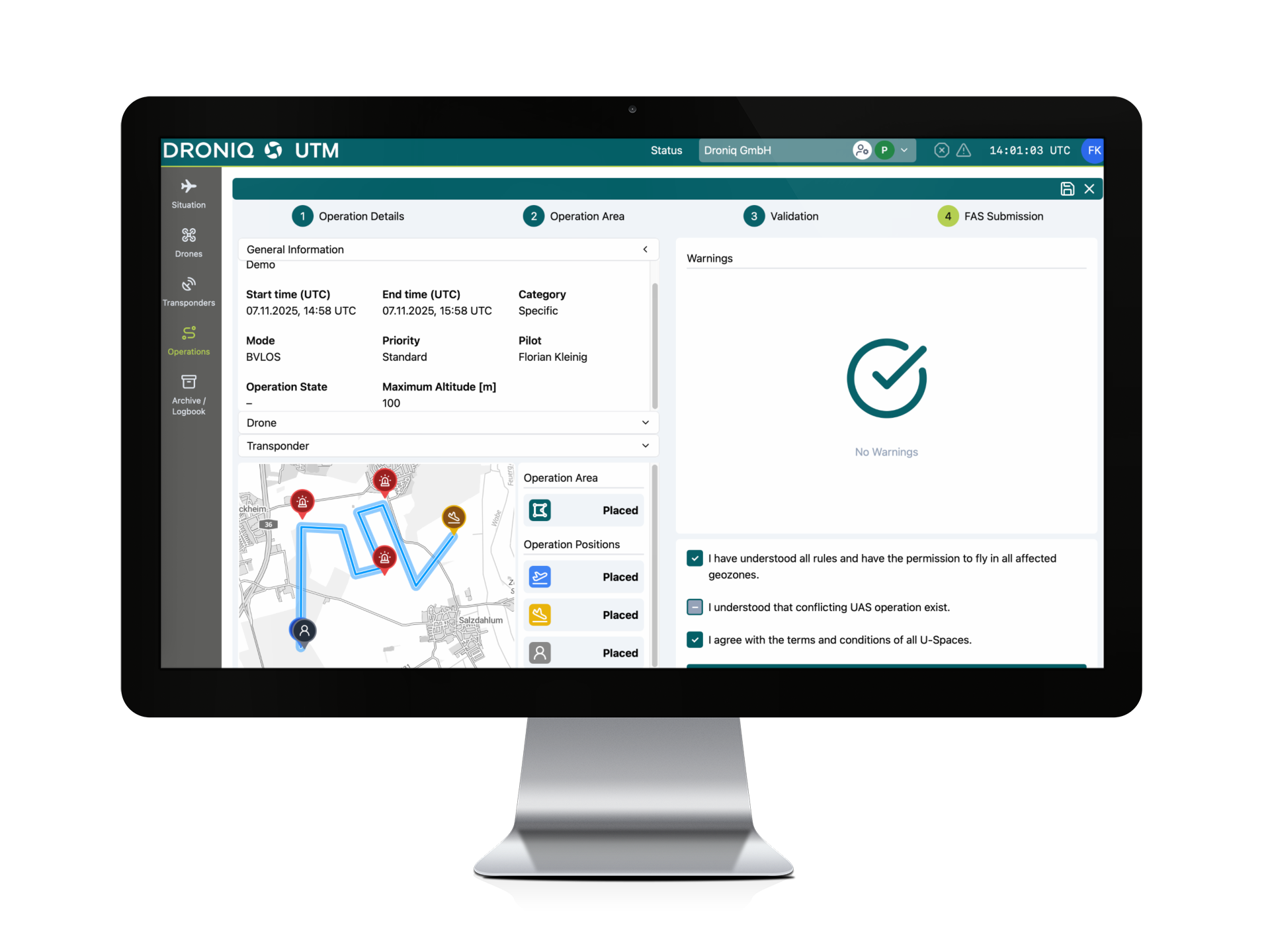
The target area is determined by the responsible control center on the basis of an incoming emergency call reporting a person in distress in the water. Parallel to the conventional alerting of the water rescue service or the responsible fire department, the control center now also automatically sends the drone to the area of operation. This is done exclusively after an emergency has been detected and not as a preventive measure.
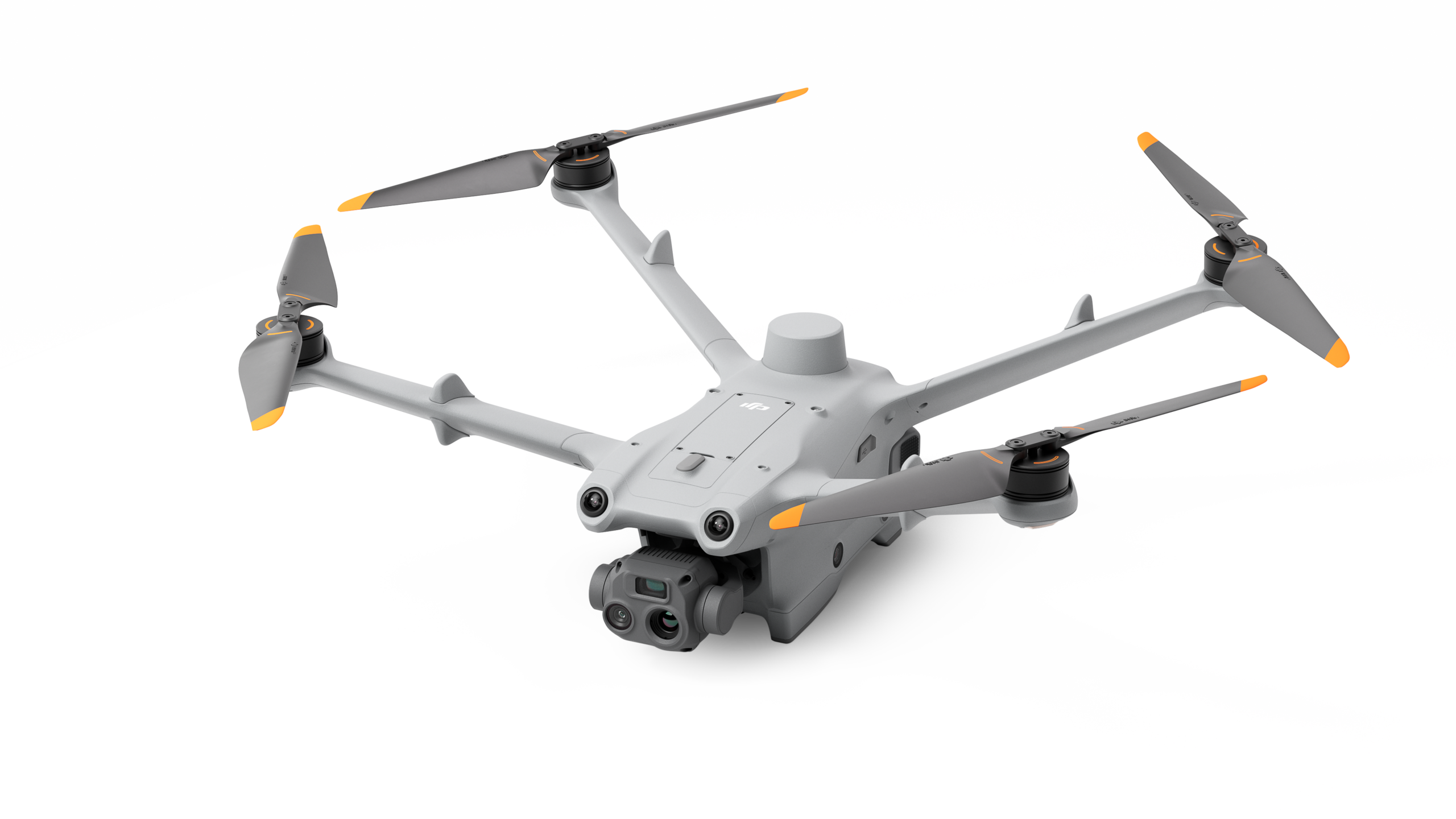
The sensors installed on the drone not only ensure trouble-free flight, but the footage taken by the camera system is analyzed by an AI algorithm specially trained at BTU Cottbus-Senftenberg (BTU). The person in distress is identified via a neural network, learned with large amounts of video material. Also crucial here are the defined search patterns, which help to find the person not only as quickly as possible, but also in an energy-saving flight for the drone at defined flight altitudes.
Once the person is identified with sufficient accuracy, the drone approaches the person and can drop up to two floats, each weighing 200g, next to the person himself or next to people coming to his aid. These floats automatically inflate upon contact with the water and then serve as flotation devices for the casualties. The drone then remains above the person in distress to guide the arriving rescue forces to the scene with pinpoint accuracy. Once these forces have arrived, the drone returns to the hangar and lands.
After the hangar is closed, a post-flight check is carried out in the hangar, using both telematics data and camera images of the rotors to search for any damage. If the check is completed successfully, the RescueFly system reports to the control center that it is ready for operation again.
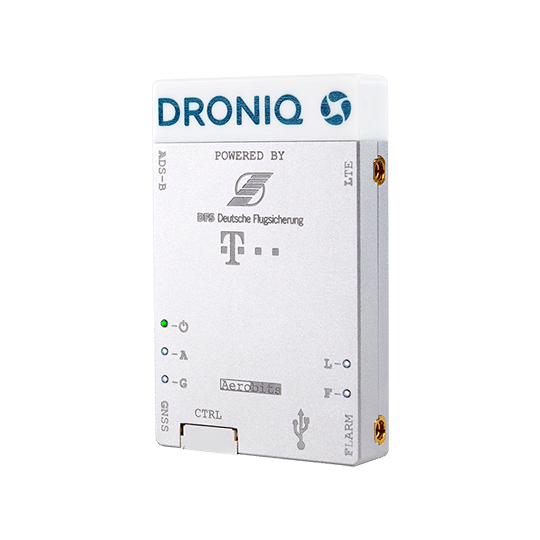
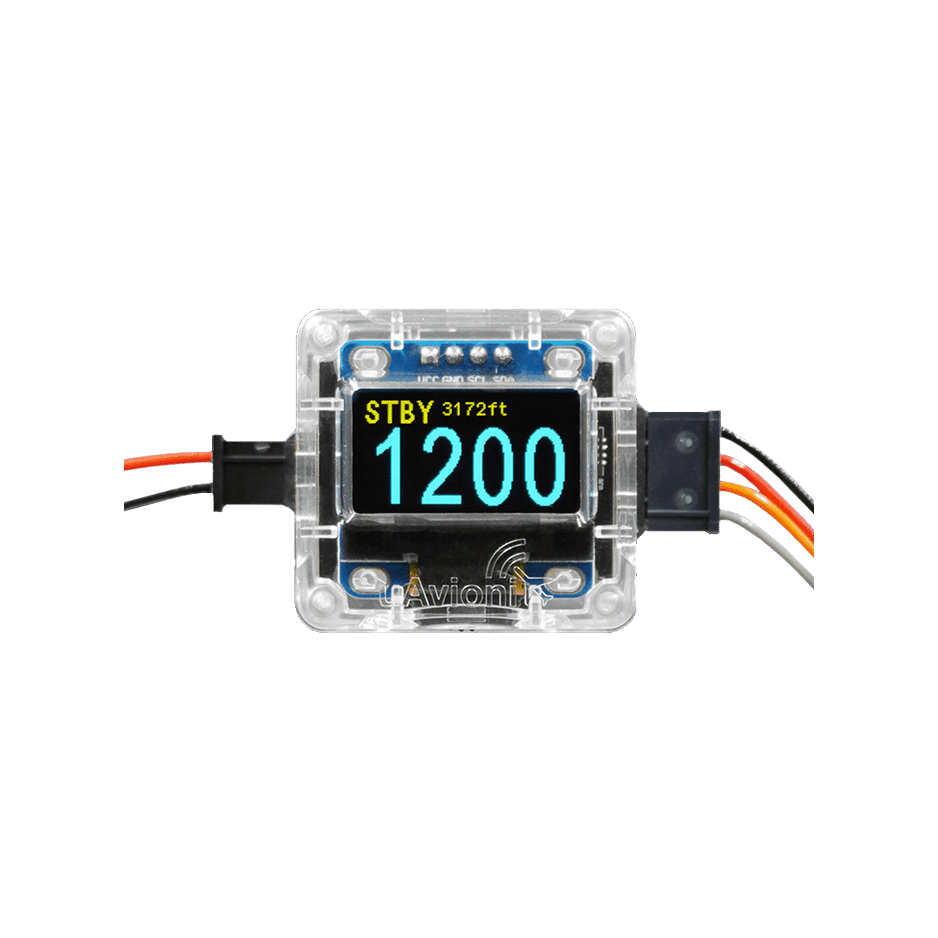
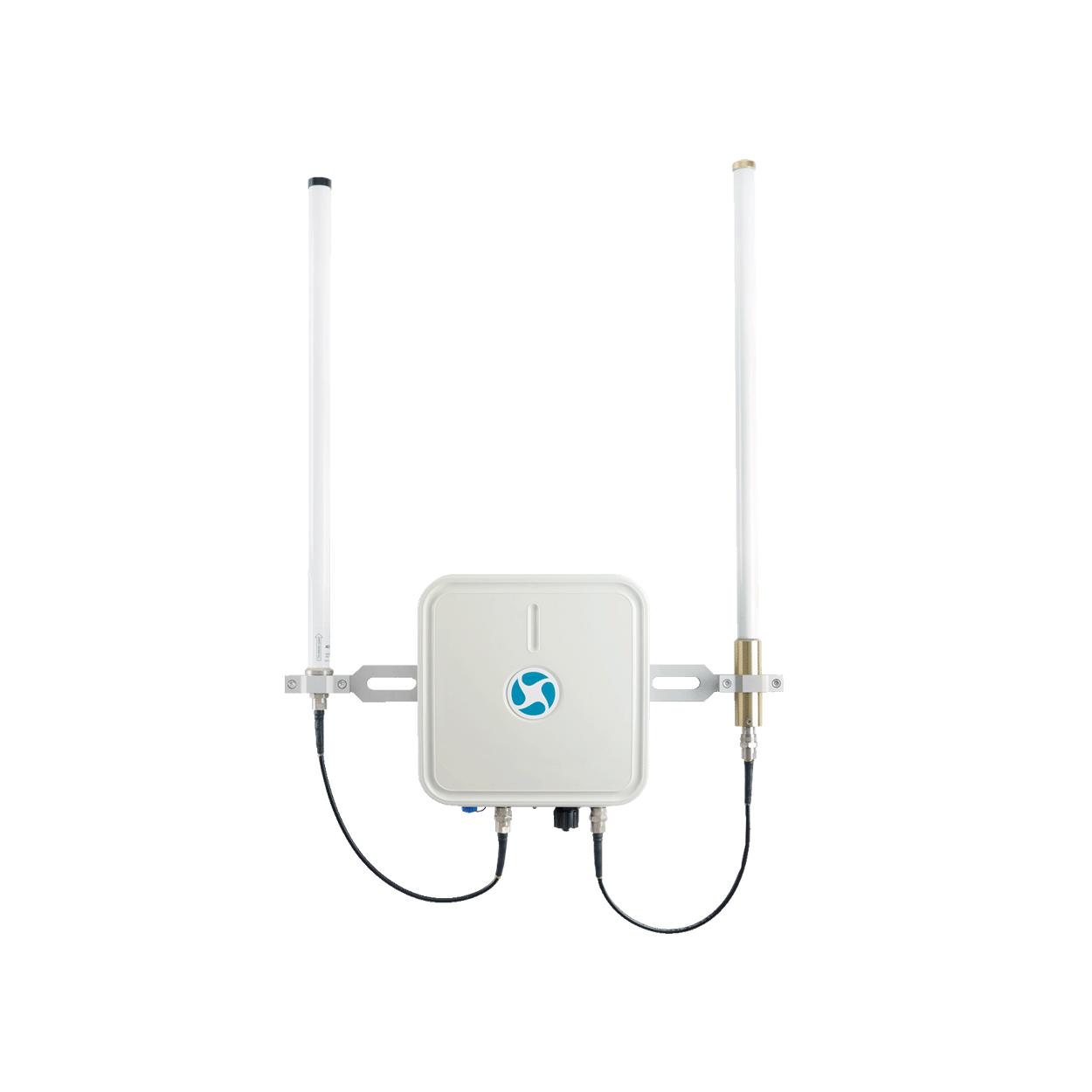
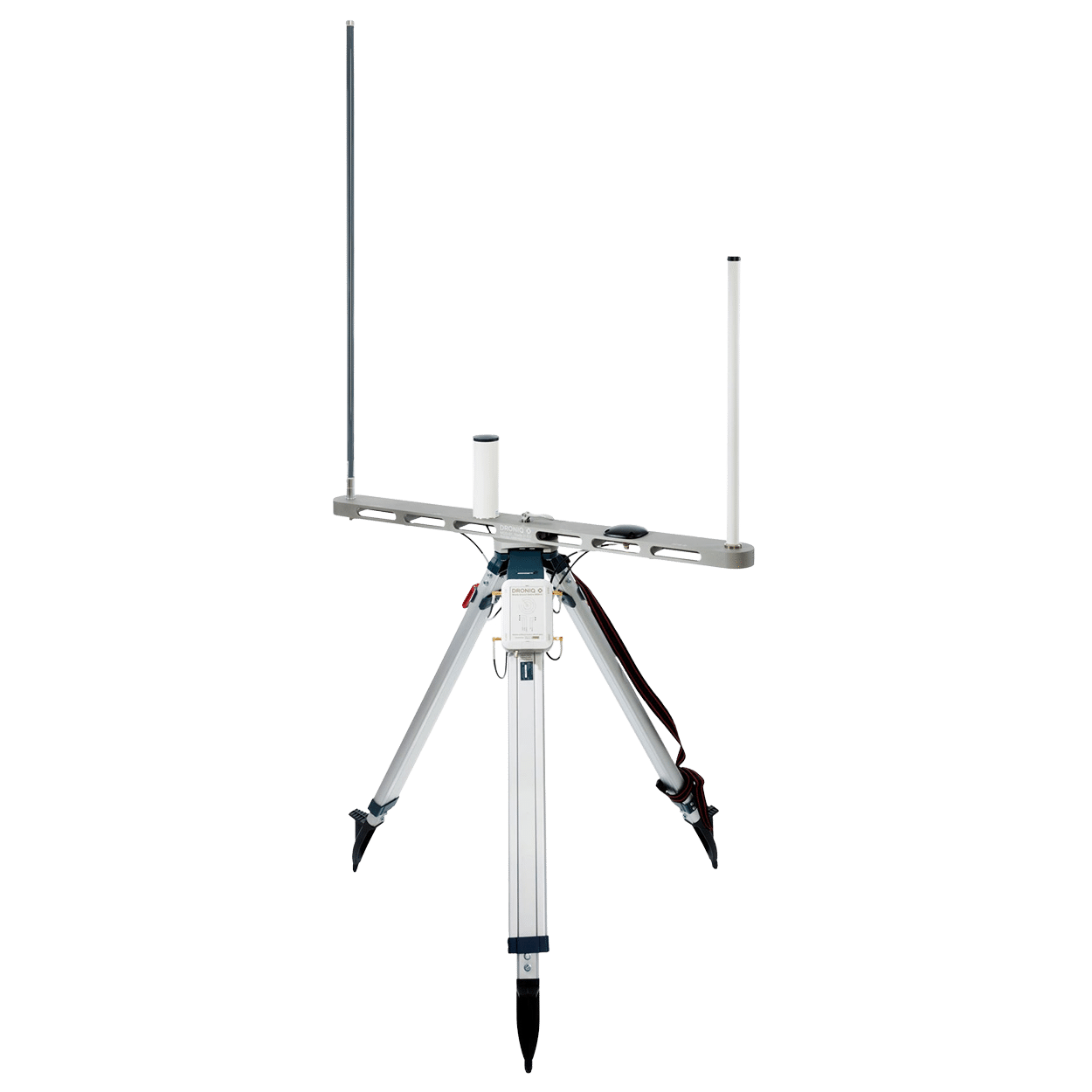
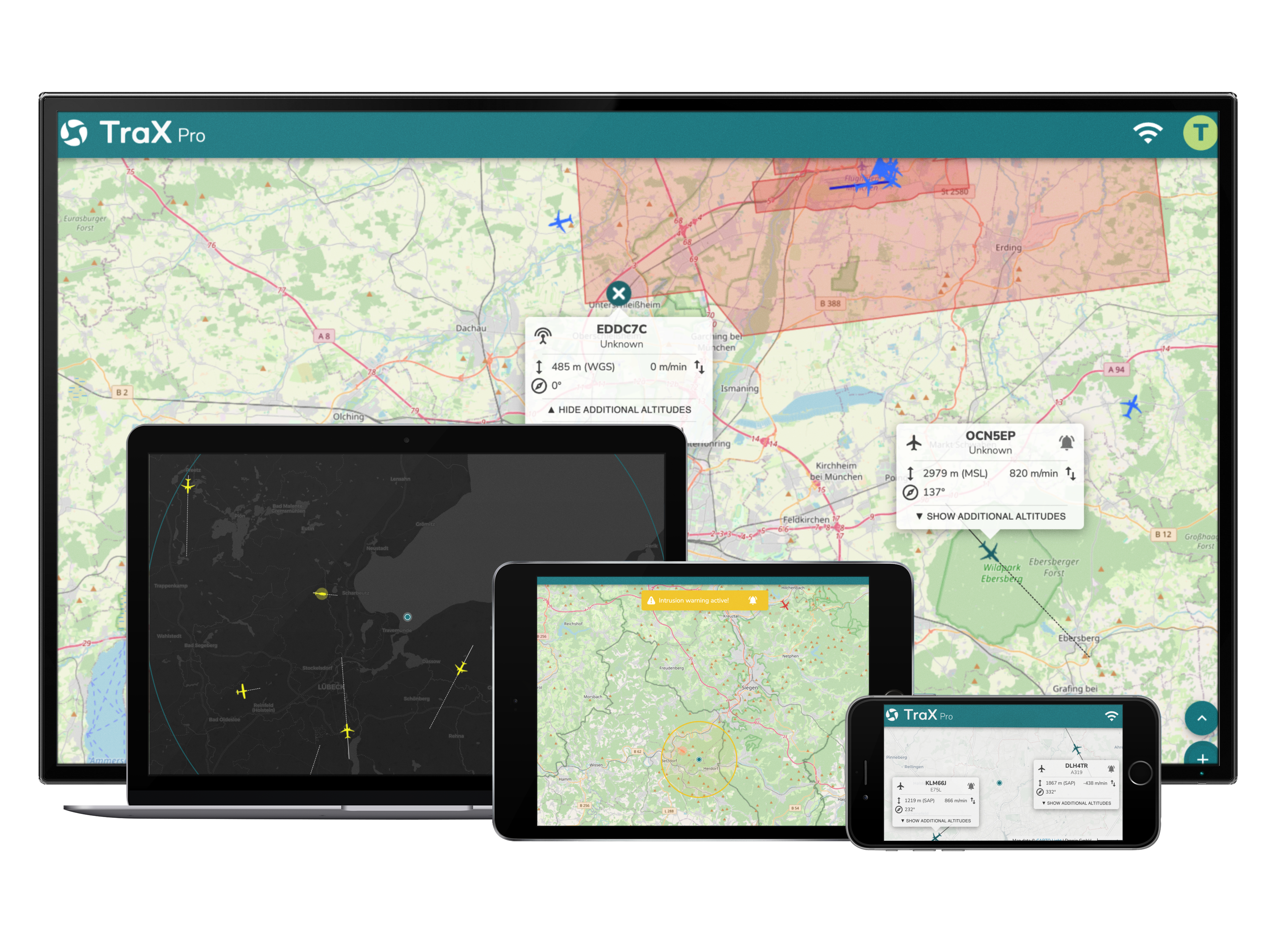
As part of the overall project managed by the Brandenburg Institute for Society and Security (BIGS), emergency call pillars / emergency call telephones (NRT) were also set up by the Björn Steiger Foundation at the lakes for validation purposes, and antenna systems were installed in Welzow and Laubusch by the company DRONIQ. These antennas, in combination with the "hook on device", an LTE transponder developed by DRONIQ, enable the (digital) visualization of the drone in the control center. Furthermore, the aforementioned sensor technology enables the other air traffic participants to see the drone as well, resulting in safe air traffic for all sides. In order to make the RescueFly system transferable to other regions, the selection of optimal locations for the hangar, the NRTs, the antennas as well as the probabilities for possible areas of operation were made exclusively on the basis of Open Data. All systems used are characterized by a consistent open source approach, which simplifies further developments.
The entire flight of the drone was monitored by a remote pilot, as required in Germany, in order to be able to intervene immediately if necessary.
Project participants:
Copyright image material: Björn Steiger Foundation